
BionicFinWave
Robot submarino con un sistema de aletas único.
Las planarias marinas, la sepia y el aba tienen una cosa en común, y es que para desplazarse generan una onda constante con sus aletas longitudinales que los propulsa por todo el largo de su cuerpo.
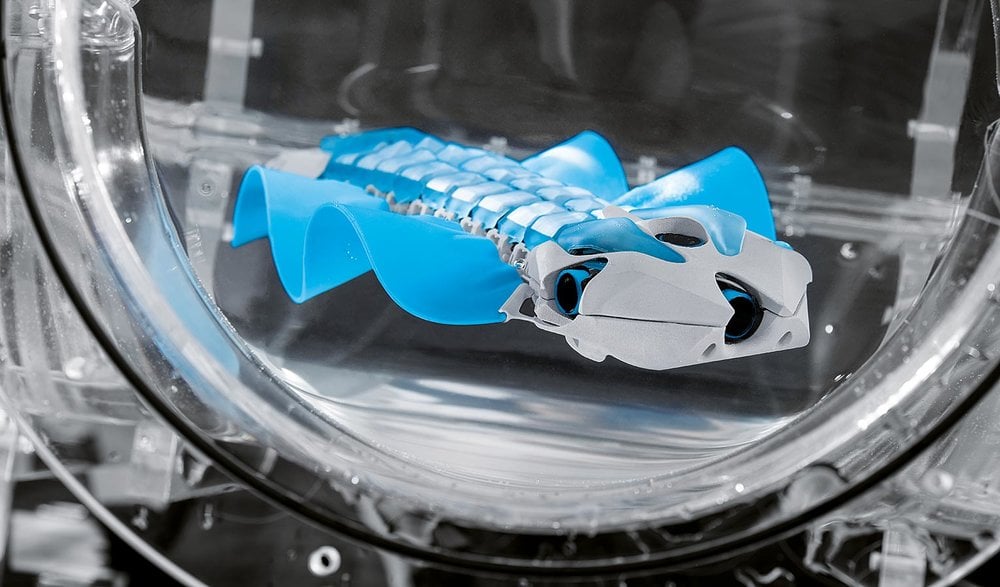
Gracias a este denominado movimiento ondulante de la aleta, el BionicFinWave se maniobra mediante un sistema de tubos de cristal acrílico. El robot submarino autónomo se comunica con el mundo exterior por radio y los datos recopilados, como los valor de sensor reunidos sobre temperatura y presión se transfieren a una tabla.
Las aletas longitudinales de los modelos naturales transcurren de la cabeza a la cola y se encuentran en la espalda, barriga o en ambos lados del cuerpo. El movimiento ondular de las aletas hace que los animales acuáticos desplacen el agua hacia atrás, lo que permite que se produzca un impuso hacia adelante.
Con el movimiento inverso, los peces también pueden desplazarse hacia atrás y, en función del patrón de las ondas, pueden ir hacia arriba, abajo y a los lados.
Aletas de silicona flexibles para conseguir maniobras naturales
El BionicFinWave emplea sus dos aletas laterales para conseguir desplazarse hacia adelante. Están totalmente recubiertas de silicona y trabajan sin la presencia de travesaños ni otros elementos de protección. Esto hace que sean extraordinariamente flexibles y que puedan reproducir los movimientos ondulares líquidos de los modelos biológicos que nos ofrece la naturaleza.
Para ello, ambas aletas (a la izquierda y a la derecha) cuentan con nueve brazos de palanca de tamaño reducido. Estos reciben el impulso necesario desde dos servomotores alojados en el cuerpo de robot submarino.
Los dos cigüeñales adyacentes transfieren la fuerza a las palancas de manera que ambas aletas se puedan mover de manera individual. De este modo pueden generar patrones de ondas diferentes que proporcionan un desplazamiento hacia adelante lento y preciso. Además, así el agua se arremolina menos que, por ejemplo, con una tracción de tornillo convencional.
Para poder girar, la aleta exterior se desplaza más rápido que la interior. Esto se puede comparar con las cadenas de una excavadora. Un tercer servomotor de la cabeza de BionicFinWave controla la flexión del cuerpo y gracias a su ayuda puede moverse hacia arriba y hacia abajo.
Para que los cigüeñales puedan ofrecer la flexibilidad y el plegado oportunos, entre cada segmento de la palanca se aloja un eje cardán. Para ello, los cigüeñales, las articulaciones y las bielas de plástico en una pieza se consiguen mediante un procedimiento de impresión 3D.
Combinación inteligente de diferentes componentes
El resto de elementos del cuerpo del BionicFinWave también se han imprimido en 3D. Las cavidades permiten que se comporten como un cuerpo flotador. De manera simultánea, en el espacio más reducido, todas las tecnologías de control y regulación son impermeables, están fijadas de manera segura y encajan entre sí.
Asimismo, en la parte delantera del cuerpo, junto a la placa con procesador y el módulo de radio, se encuentran un sensor de presión y sensores de ultrasonido. Miden constantemente las distancias a las paredes y la profundidad en el agua, lo que permite evitar colisiones con los sistemas de tubos.
Impulsos y planteamientos novedosos para la industria de procesos
Una vez más, nuestra Bionic Learning Network da un impulso en lo referente a la forma de trabajar del futuro con robots autónomos y tecnologías de propulsión novedosas para medios acuáticos.
Sería interesante seguir desarrollando conceptos como BionicFinWave para tareas de inspección, secuencias de medición o recopilaciones de datos en áreas como la tecnología hidráulica y de aguas residuales, o en otros ámbitos de la industria de procesos.
Además, se pueden aprovechar los conocimientos adquiridos en el proyecto para los procesos de fabricación de componentes de robótica blanda.
www.festo.com
